Spiking Neural Networks (SNNs) and Its Applications
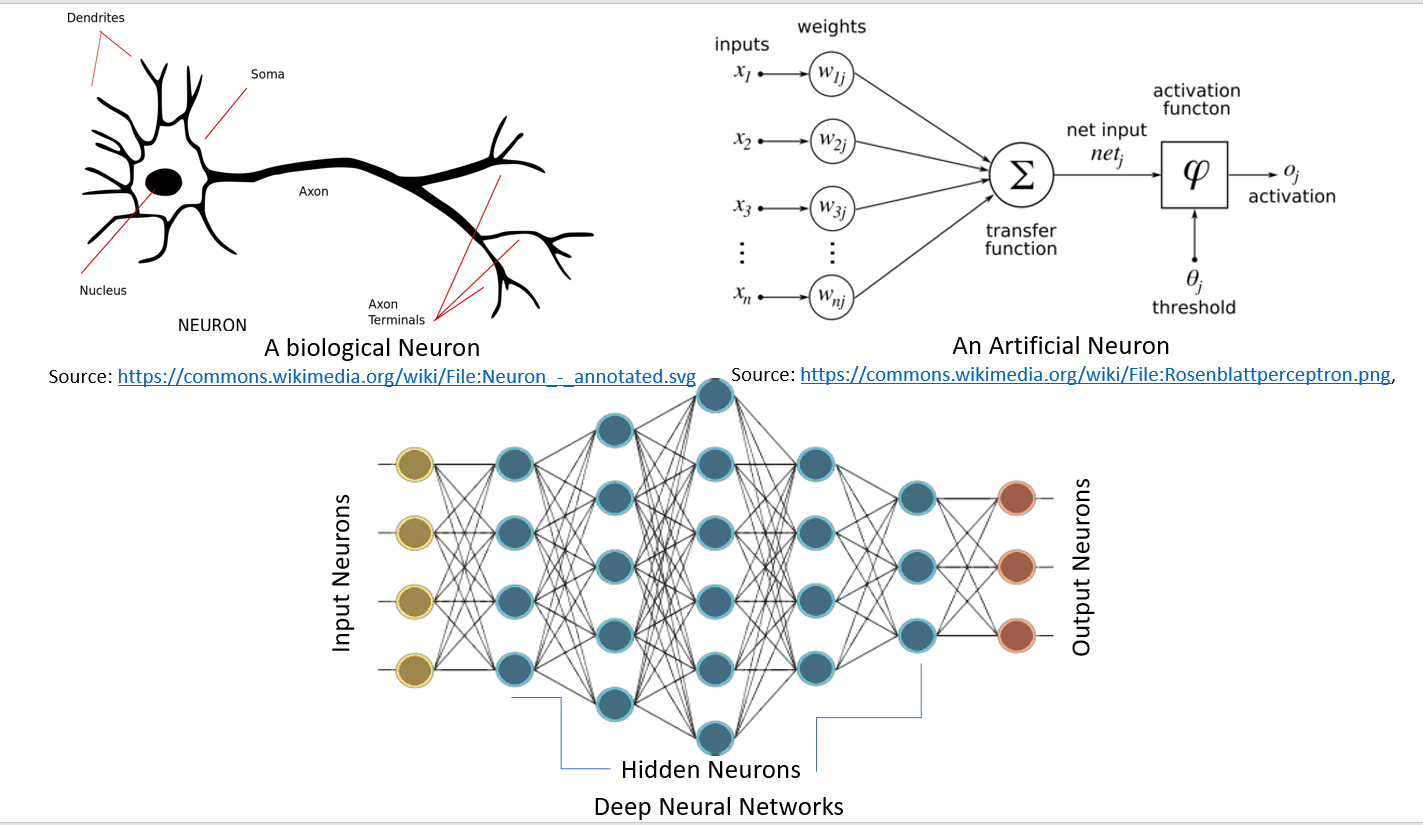
Spiking Neural Networks (SNNs) are artificial neural networks that model biological neurons’ behavior more closely than traditional artificial neural networks. In SNNs, information is represented and processed using spikes or brief electrical events, similar to how neurons communicate in the brain.
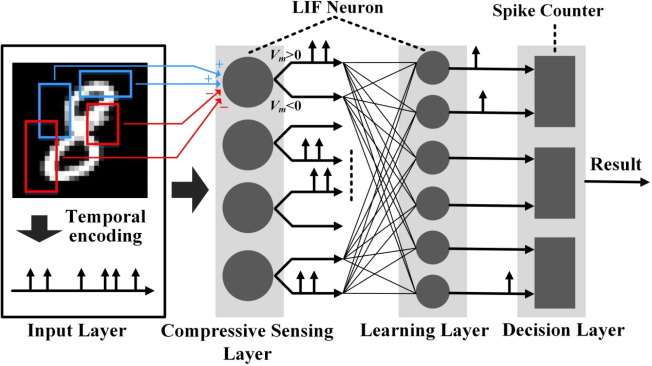
In an SNN, each neuron receives input from other neurons and processes this information by integrating it over time. When the neuron’s membrane potential reaches a certain threshold, it generates a spike, transmitted to other neurons in the network. The timing and pattern of these spikes carry information about the input received by the network.
SNNs have been studied for their potential applications in image and speech recognition, robotics, and neuromorphic computing. They are particularly useful in tasks that require temporal information processing, such as time-series prediction, because they can naturally represent the time-varying nature of the input. However, SNNs are generally more complex and computationally expensive than traditional artificial neural networks, making them more difficult to train and implement.
Comparing Spiking Neural Networks and traditional artificial neural networks in terms of complexity
Spiking Neural Networks (SNNs) are generally considered to be more complex than traditional artificial neural networks (ANNs). This is because SNNs model the behavior of biological neurons more closely, which involves more complex dynamics than the simplified mathematical models typically used in ANNs.
In an SNN, each neuron integrates its input over time and generates spikes, which are transmitted to other neurons in the network. This means that the behavior of an SNN is not only a function of the input it receives but also of the timing and pattern of the spikes generated by the neurons. This makes SNNs more difficult to analyze and understand than ANNs, which have a more straightforward input-output behavior.
Furthermore, training SNNs can be more challenging than ANNs, as the spike-based dynamics require specialized learning algorithms and training techniques. For example, backpropagation, widely used for training ANNs, cannot be directly applied to SNNs due to the non-differentiability of the spike-based neuron models. Instead, alternative training methods, such as spike-timing-dependent plasticity (STDP) and rate-based approaches, have been proposed.
Despite these challenges, SNNs have shown promising results in various applications, particularly in tasks that require temporal information processing, such as time-series prediction and event recognition. They are also being explored for their potential use in neuromorphic computing, which aims to develop computing systems that mimic the function of the brain.
Training and implementing SNNs
Training and implementing Spiking Neural Networks (SNNs) can be more challenging than traditional artificial neural networks due to the spike-based neuron models and the temporal dynamics of the network. Here are some common methods for training and implementing SNNs:
1. Spike-timing-dependent plasticity (STDP)
This biologically inspired learning rule modifies the strength of the connections between neurons based on the relative timing of their spikes. In STDP, connections between neurons that fire together are strengthened, while connections between neurons that fire apart are weakened. STDP can train SNNs by adjusting the connection weights between neurons to minimize the difference between the network’s output and the desired output.
2. Rate-based approaches
In rate-based approaches, the spikes of the neurons are replaced by a continuous firing rate, which is a smoothed representation of the neuron’s activity over time. This allows using traditional optimization techniques, such as backpropagation, to train the network. However, this approach also loses some important temporal information the spikes represent.
3. Direct optimization of spike times
In this approach, the spike times of the neurons are directly optimized to minimize the difference between the network’s output and the desired output. This can be done using gradient descent optimization techniques, although it can be computationally expensive.
In terms of implementation, SNNs can be implemented in hardware or software. Neuromorphic hardware, such as neuromorphic chips, is designed to implement SNNs efficiently due to their parallelism and event-driven operation. Software implementations of SNNs can be done using specialized libraries and frameworks, such as NEST, Brian, and PyNN, which provide tools for building and simulating SNNs.
Overall, training and implementing SNNs require specialized knowledge and techniques, but they offer potential advantages in tasks that require temporal information processing and in the development of neuromorphic computing systems.
Applications of Spiking Neural Networks
Spiking Neural Networks (SNNs) have shown promising results in various applications due to their ability to represent the time-varying nature of the input naturally. Here are some specific applications of SNNs:
1. Time-series Prediction
Time-series prediction is a common application of Spiking Neural Networks (SNNs) that involves forecasting future values of a time-dependent variable based on its past values. It is used in various fields, such as finance, economics, weather forecasting, and speech recognition.
In time-series prediction tasks, SNNs can be trained to learn the patterns and relationships in the time-series data and then use this knowledge to predict future values. SNNs can naturally represent the temporal dynamics of the input, making them well-suited for these types of tasks.
The input to an SNN for time-series prediction is typically a sequence of past values of the time-dependent variable. And the output is the variable’s predicted future value(s). The SNN processes the input sequence over time, generating spikes in response to the input. The timing and pattern of these spikes carry the information about the input sequence and are used to generate the output prediction.
Various architectures and training methods can be used for time-series prediction with SNNs, such as recurrent neural networks (RNNs) and spike-timing-dependent plasticity (STDP) learning rules. RNNs are a type of neural network that can naturally represent sequential data, making them well-suited for time-series prediction tasks. STDP learning rules modify the strength of the connections between neurons based on the relative timing of their spikes, allowing the SNN to learn the temporal patterns in the data.
Overall, SNNs offer potential advantages in time-series prediction tasks due to their ability to naturally represent the time-varying nature of the input and capture the temporal relationships between data points.
2. Event Recognition
Event recognition is another application of Spiking Neural Networks (SNNs) that involves identifying and classifying events occurring over time. It is used in various fields, such as video surveillance, robotics, and speech recognition.
In event recognition tasks, SNNs can be trained to learn the patterns and relationships in the sequence of events and then use this knowledge to classify new sequences. SNNs can naturally represent the temporal dynamics of the input, making them well-suited for these types of tasks.
The input to an SNN for event recognition is typically a sequence of events, where a set of features represents each event. The output is the predicted class label for the sequence of events. The SNN processes the input sequence over time, generating spikes in response to the input. The timing and pattern of these spikes carry the information about the input sequence and are used to generate the output classification.
Various architectures and training methods can be used for event recognition with SNNs, such as spiking convolutional neural networks (CNNs) and spike-based learning rules. Spiking CNNs are a type of neural network that can naturally represent spatial and temporal features in the input, making them well-suited for event recognition tasks that involve video or image data. Spike-based learning rules modify the strength of the connections between neurons based on the timing of their spikes, allowing the SNN to learn the temporal patterns in the data.
Overall, SNNs offer potential advantages in event recognition tasks due to their ability to naturally represent the time-varying nature of the input and capture the temporal relationships between events.
3. Robotics
Spiking Neural Networks (SNNs) have been used in robotics for various tasks, including locomotion control, grasping and manipulation, and autonomous navigation. SNNs can represent sensor data in real-time and generate motor commands in response to the input, providing a biologically inspired approach to control tasks in robotics.
In locomotion control, SNNs can be used to control the gait of a robot, such as a quadruped or bipedal robot. SNNs can process the sensor data from the robot’s limbs and generate motor commands that result in coordinated movement. The temporal dynamics of SNNs make them well-suited for this type of control task, as they can capture the rhythmic patterns of locomotion.
In grasping and manipulation, SNNs can control the movements of a robotic arm or gripper. SNNs can process the sensor data from the object being grasped and generate motor commands that result in a stable grip or manipulation of the object. The ability of SNNs to represent the time-varying nature of the input and capture the temporal relationships between data points can be useful for this type of control task.
In autonomous navigation, SNNs can be used to control the movements of a robot in a dynamic environment. SNNs can process sensor data from cameras, lidars, or other sensors and generate motor commands that result in safe and efficient navigation. The ability of SNNs to represent the temporal dynamics of the environment can be useful for this type of control task, as they can capture the changes in the environment over time.
Overall, SNNs offer potential advantages in robotics because they can represent sensor data in real-time and generate motor commands in response to the input. However, training and implementing SNNs for robotics can be challenging, as it requires specialized knowledge and techniques in neuroscience and robotics.
4. Neuromorphic Computing
Neuromorphic computing is a field of research that aims to develop computing systems that mimic the structure and function of the brain. Spiking Neural Networks (SNNs) are a key component of neuromorphic computing, as they are designed to model the behavior of biological neurons more closely than traditional artificial neural networks.
The goal of neuromorphic computing is to create computing systems that are highly efficient, both in terms of power consumption and processing speed, and can perform tasks that are difficult for traditional computing systems, such as pattern recognition, real-time control, and cognitive processing. Neuromorphic computing can be implemented in hardware or software.
Hardware implementations of neuromorphic computing use specialized chips, such as neuromorphic chips or memristors, designed to mimic the behavior of biological neurons and synapses. These chips are highly parallel and operate using event-driven processing, which is more biologically realistic than the clock-driven processing used in traditional computing. Hardware implementations of neuromorphic computing can achieve high-speed and low-power processing, making them well-suited for applications such as robotics and autonomous vehicles.
Software implementations of neuromorphic computing use specialized libraries and frameworks, such as NEST, Brian, and PyNN, to simulate the behavior of SNNs on traditional computing systems. These simulations can be used to study the behavior of SNNs, develop new learning algorithms, and test the performance of SNNs on various tasks.
Overall, neuromorphic computing offers potential advantages over traditional computing systems, particularly in tasks that require real-time processing, low power consumption, and cognitive processing. However, the development and implementation of neuromorphic computing systems are still in its early stages, and further research is needed to realize its potential fully.
5. Brain-computer Interfaces (BCIs)
Brain-computer interfaces (BCIs) allow people to control devices using brain signals, such as prosthetics or computers. Spiking Neural Networks (SNNs) have been used in BCIs to decode brain signals in real-time and generate commands for the device.
BCIs use electrodes to measure the electrical activity in the brain, which is then processed by the BCI system to generate commands for the device. SNNs can decode the brain signals in real-time and generate precise commands for the device based on the user’s intentions. SNNs can capture the temporal dynamics of the brain signals, which can be useful for identifying the user’s intended actions.
In BCIs, SNNs can be used for various tasks, such as controlling prosthetic limbs, typing on a computer, or navigating a wheelchair. For example, SNNs can be used to decode the user’s intended arm movements from brain signals and generate commands to control the movements of a prosthetic arm. SNNs can also decode the user’s intended letter or word from brain signals and generate commands to type on a computer.
BCIs using SNNs have the potential to provide more natural and intuitive control of devices, as they can decode the user’s intentions in real-time and generate precise commands based on the temporal dynamics of the brain signals. However, developing and implementing BCIs using SNNs can be challenging, requiring specialized knowledge and techniques in neuroscience and engineering.
Overall, BCIs using SNNs offer potential advantages in providing people with disabilities or injuries greater control over their environment, improving their quality of life and independence.