

Neuromorphic computing is a type of computing inspired by the human brain’s structure and function. It involves building computer systems that use electronic circuits to mimic the way that neurons in the brain communicate with each other. Neuromorphic computing aims to create highly efficient systems that can learn and adapt to new data in real-time, much like the human brain.
Neuromorphic computing has several potential applications, including robotics, computer vision, and natural language processing. By mimicking how the brain processes information, neuromorphic systems can achieve higher efficiency and accuracy than traditional computing systems. However, there are still many challenges to be overcome in developing practical neuromorphic systems, such as designing efficient algorithms and hardware architectures and developing effective training methods for spiking neural networks.
There are several approaches to neuromorphic computing, each with strengths and weaknesses. Here are a few of the most common approaches:
Different Approaches to Neuromorphic Computing

1. Spiking Neural Networks (SNNs)
As I mentioned earlier, SNNs are modeled on how neurons in the brain communicate using electrical impulses. SNNs use spikes to represent information rather than the continuous analog signals used in traditional neural networks. This approach is particularly well-suited for tasks that require temporal processing, such as speech recognition or image classification.
2. Digital Neuromorphic Computing
This approach uses digital circuits to simulate the behavior of neurons and synapses. Digital neuromorphic systems can be implemented using standard digital logic circuits, which makes them relatively easy to design and manufacture. However, analog or mixed-signal neuromorphic systems may not be as efficient.
3. Analog Neuromorphic Computing
This approach uses analog circuits to simulate the behavior of neurons and synapses. Analog circuits can be highly energy-efficient, which makes them well-suited for applications that require low power consumption. However, analog circuits can be difficult to design and manufacture and may be more susceptible to noise and other sources of error.
4. Mixed-Signal Neuromorphic Computing
This approach combines analog and digital circuits to create a hybrid system that can take advantage of the strengths of both approaches. For example, analog circuits may be used to simulate the behavior of neurons, while digital circuits are used for computation and communication.
Each of these approaches has its trade-offs. The choice of approach will depend on the specific application and design requirements of the system being developed.
Benefits of Neuromorphic Computing


Neuromorphic computing has the potential to offer several benefits in various fields and applications. Here are some of them:
1. Energy efficiency
Neuromorphic computing can be more energy-efficient than traditional computing, especially for tasks requiring low power consumption. This is because neuromorphic systems are designed to mimic how the brain processes information. This is highly parallel and distributed and can be executed efficiently using specialized hardware.
2. Real-time processing
Neuromorphic systems can process data in real-time, making them suitable for applications that require low-latency processing. Some examples are robotics, autonomous vehicles, and real-time control systems.
3. Adaptability
Neuromorphic systems can adapt to new data and situations in real-time, making them well-suited for applications that require learning and adaptation, such as natural language processing, computer vision, and speech recognition.
4. Robustness
Neuromorphic systems can be highly robust to noise and other sources of error, making them well-suited for applications that require high reliability and fault tolerance.
5. Brain-inspired computing
Neuromorphic computing is inspired by the structure and function of the human brain. This could lead to new insights and understanding of how the brain works and potentially new approaches to solving problems in neuroscience and related fields.
Overall, the potential benefits of neuromorphic computing are many and varied and could significantly impact a wide range of applications and fields. However, there are still many challenges to be overcome in developing practical neuromorphic systems, and much research and development is still needed in this area.
An Example of A Real-world Application
One example of a real-world application that uses neuromorphic computing is in the field of robotics. Neuromorphic systems can be used to create robots that are more energy-efficient, adaptable, and responsive to their environments.
For example, researchers at the University of Zurich have developed a neuromorphic robot called “Nerf,” which uses a spiking neural network to process sensory information and control movements. The robot has a flexible, soft body, which allows it to navigate through complex environments and interact with objects in a more human-like way.
Another example is the “SpiNNaker” system, a large-scale neuromorphic computing platform developed by researchers in the UK. The system consists of a custom-designed chip that can simulate the behavior of up to one billion neurons in real time. It is being used to study the behavior of neural circuits in the brain and to develop new algorithms for machine learning and computer vision.
Overall, these examples demonstrate the potential of neuromorphic computing to create more intelligent and adaptive systems and to advance our understanding of the brain and its functions.
Differences between Neuromorphic Computing and Traditional Computing
Neuromorphic computing differs from traditional computing in several key ways, including:
1. Architecture
The architecture of a computing system refers to the overall design of the system, including its hardware and software components and the way they are organized and interconnected. Neuromorphic computing has a different architecture than traditional computing, designed to mimic the behavior of neurons and synapses in the brain.
In traditional computing, the architecture typically consists of a central processing unit (CPU) or graphics processing unit (GPU) that executes instructions provided by software programs. The CPU or GPU is connected to memory and storage devices and input and output devices such as keyboards, mice, and displays.
In contrast, neuromorphic computing uses a different type of architecture designed to mimic the structure and function of the brain. Neuromorphic systems typically consist of specialized hardware components designed to simulate the behavior of neurons and synapses, as well as software designed to train and operate spiking neural networks.
The hardware components of a neuromorphic system may include custom-designed chips or field-programmable gate arrays (FPGAs) optimized for spiking neural network computations. These chips and FPGAs may be organized into a network or array that mimics the brain’s structure, with neurons and synapses communicating with each other in a highly distributed and parallel manner.
The software components of a neuromorphic system may include tools and libraries used to train and operate spiking neural networks. They also consist of programming models designed to run on specialized hardware. These software components may differ from traditional programming models used in traditional computing. The reason is that they are designed to operate on spiking neural networks rather than traditional algorithms.
2. Computation
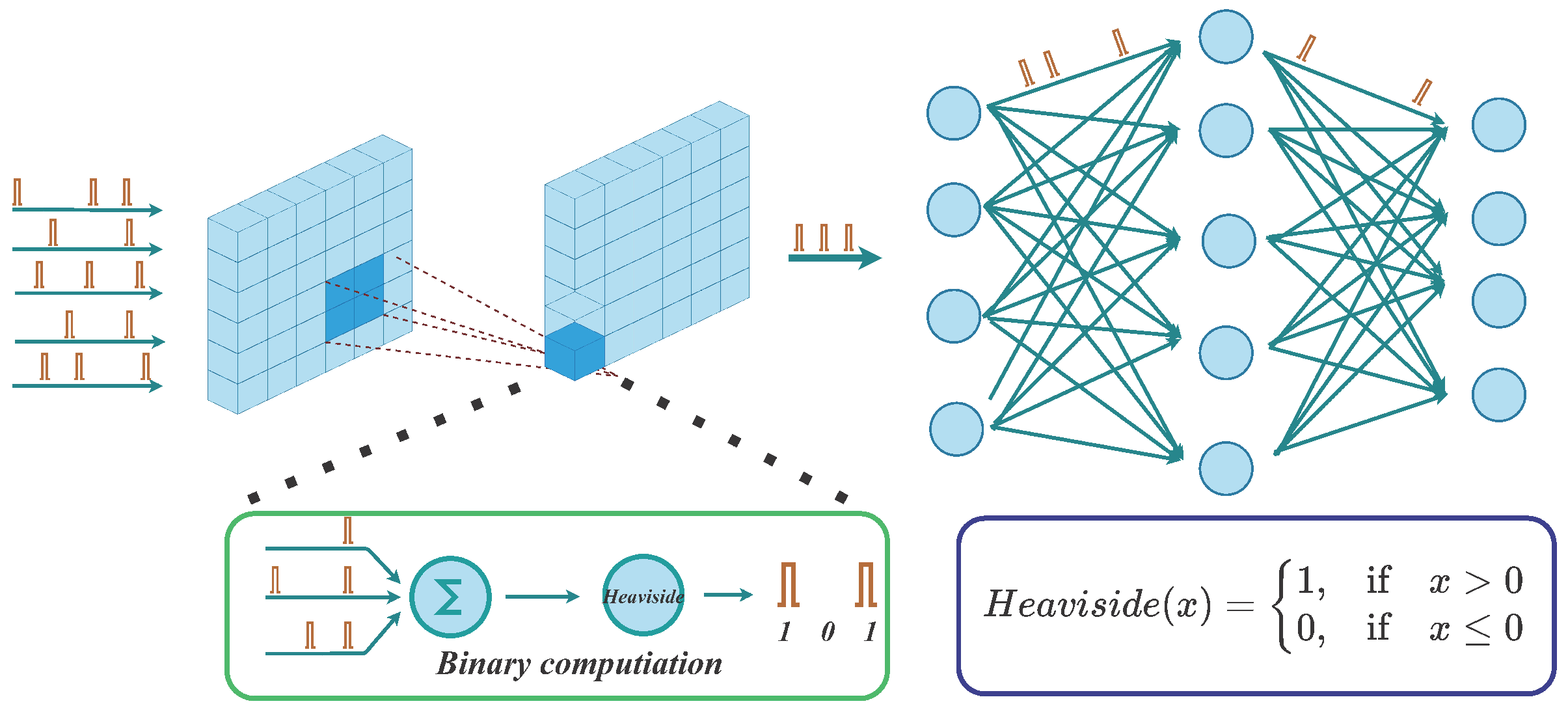
The computation in neuromorphic computing fundamentally differs from traditional computing in several ways. Traditional computing is based on algorithms that humans program to perform specific tasks. In contrast, neuromorphic computing uses spiking neural networks trained using data to perform various tasks, including pattern recognition, image processing, and control.
Spiking neural networks are designed to mimic the behavior of neurons and synapses in the brain. They consist of a large number of interconnected nodes, each of which represents a neuron. These nodes communicate with each other using electrical signals, or spikes, that are transmitted across synapses.
Compared to traditional computing, the computation in spiking neural networks is highly parallel and distributed, with many neurons and synapses communicating simultaneously. This allows spiking neural networks to achieve high performance and efficiency levels and adapt and learn in real-time based on the data they receive.
3. Power consumption
Power consumption is an important consideration in computing systems, as it directly affects the system’s cost and environmental impact. Neuromorphic computing is often more energy-efficient than traditional computing, as it is designed to mimic the energy-efficient communication of neurons in the brain.
In traditional computing systems, most operations are performed using continuous analog signals that consume a significant amount of power. In contrast, neuromorphic computing uses spiking neural networks that communicate using discrete electrical pulses or spikes. This allows neuromorphic systems to achieve high-performance levels while using significantly less power than traditional computing systems.
Neuromorphic systems are typically designed to be highly energy-efficient in several ways. First, the specialized hardware used in neuromorphic systems is often designed to consume less power than traditional CPUs and GPUs. This can be achieved through various techniques, such as reducing the size of transistors or using more efficient circuit designs.
Second, spiking neural networks are designed to mimic the energy-efficient communication of neurons in the brain. In the brain, neurons communicate using spikes that consume very little energy compared to the continuous analog signals used in traditional computing. Using spiking neural networks, neuromorphic systems can achieve high-performance levels while consuming significantly less power than traditional computing systems.
4. Real-time processing
Real-time processing is the ability of a computing system to respond to input and generate output promptly, typically within a few milliseconds or less. Neuromorphic computing is often well-suited for real-time processing. In fact, it is designed to operate in a highly parallel and distributed manner.
In traditional computing systems, processing is typically performed serially, with one operation performed at a time. This can result in significant latency, or delay, between the input and output of the system. In contrast, neuromorphic systems are designed to operate in a highly parallel and distributed manner, with many neurons and synapses communicating simultaneously. This allows neuromorphic systems to process input and generate output in real-time without significant latency.
Real-time processing is particularly important in applications such as robotics, autonomous vehicles, and other real-time control systems. In these applications, the computing system must be able to respond to changes in the environment or input from sensors in real-time. Also, it should generate output that controls the system’s behavior. Neuromorphic computing is well-suited for these applications, as it can process data in real-time and generate output that controls the system’s behavior promptly.
Challenges in Developing Neuromorphic Systems
There are several challenges involved in developing neuromorphic systems, including:
1. Hardware design
Neuromorphic systems require specialized hardware that can efficiently simulate the behavior of spiking neural networks. This hardware can be complex to design and manufacture and often requires custom fabrication.
2. Software development
Developing software for neuromorphic systems can be challenging, as the programming models and algorithms used to train and operate spiking neural networks can be quite different from traditional machine learning approaches.
3. Training methods
Developing effective training methods for spiking neural networks can be challenging. Unlike traditional neural networks, spiking neural networks operate using discrete spikes, making applying standard gradient-based optimization techniques more difficult.
4. Scalability
Scaling neuromorphic systems to larger sizes can be challenging. The reason is that the hardware and software requirements grow exponentially with the number of neurons and synapses.
5. Integration with existing systems
Integrating neuromorphic systems with existing computing systems and infrastructure can be challenging, especially regarding data transfer and communication between different types of hardware and software.
6. Lack of standards
Currently, there are no widely accepted standards for neuromorphic computing hardware, software, or programming models. This makes it difficult to share and reproduce research results across different groups and institutions.
Overall, these challenges highlight the need for continued research and development in neuromorphic computing and collaboration and standardization efforts across the field.